
-
Zastosowanie zasilaczy dla zewnętrznych stacji 5G 06/23/2025 00:27:35Sprzęt Elektryczny dla Konsumentów: Zalety Konfigurowalnego Zasilacza w Porównaniu z Wieloma Zasilaczami 06/23/2025 00:11:32Zastosowania funkcji redundancji w zasilaczach wyświetlaczy LED 06/22/2025 23:18:30Funkcja redundancji i zastosowanie w zasilaczach 06/19/2025 01:21:46
Left Banner
Oferty tygodnia

- -27%
FP2070TN-LE2016RP Sterownik PLC z 7 calowym HMI i wbudowanymi I/O2 458,45 zł Normalna cena 3 367,74 złDostępnych: 6Days Hrs Mins Secs 
![hover-image]()
- -53%
ATV320U40N4C Falownik serii ATV320, 3-fazowy, moc 4kW, 9.5A, IP201 820,16 zł Normalna cena 3 872,68 złDostępnych: 31Days Hrs Mins Secs 
![hover-image]()
- -13%
FP4043TN-E Sterownik PLC z wbudowanym HMI+1 slot na I/O1 567,70 zł Normalna cena 1 801,95 złDostępnych: 62Days Hrs Mins Secs 
- -52%
LC1D12BD Stycznik mocy TeSys D AC3 12A 3P 1 NO+NC Zaciski śrubowe161,17 zł Normalna cena 335,78 złDostępnych: 70Days Hrs Mins Secs 
- -55%
A9F04716 Wyłącznik nadprądowy iC60N-C16-3N C 16A 3N-biegunowy133,61 zł Normalna cena 296,92 złDostępnych: 101Days Hrs Mins Secs 
- -51%
LC1K1610P7 Stycznik mocy, TeSys K, AC3, 16A, 3P, 1NO, cewka 230VAC, zaciski skrzynkowe106,82 zł Normalna cena 217,99 złDostępnych: 174Days Hrs Mins Secs Potrzebujesz pomocy?
Ostatnie artykuły
-
Zastosowanie zasilaczy dla zewnętrznych stacji 5G 06/23/2025 00:27:35Sprzęt Elektryczny dla Konsumentów: Zalety Konfigurowalnego Zasilacza w Porównaniu z Wieloma Zasilaczami 06/23/2025 00:11:32Zastosowania funkcji redundancji w zasilaczach wyświetlaczy LED 06/22/2025 23:18:30Funkcja redundancji i zastosowanie w zasilaczach 06/19/2025 01:21:46Wykorzystanie enkodera inkrementalnego w IndustruinoAutor Przemysław Oleszczak 02/06/2018 21:56:03

Od pewnego czasu obiektem naszych zainteresowań stał się sterownik Industruino oparty na platformie Arduino. W związku z tym postanowiliśmy przetestować możliwość podpięcia do niego enkodera inkrementalnego. Testy przeprowadziliśmy na modelu IND.I/O z procesorem Atmega32u4.
Próby podłączenia rozpoczęliśmy od wejść cyfrowych sterownika. Znajdują się one w strefie cyfrowej i komunikują się z procesorem poprzez protokół I2C. Okazało się, że sygnały A i B z enkodera były odbierane prawidłowo natomiast częstotliwość ich odbierania (która jest taka sama jak czas wykonania jednej pętli programowej) była zdecydowanie za niska, aby była możliwość zastosowania takiej metody w rozwiązaniach przemysłowych.
W zaistniałej sytuacji musieliśmy podłączyć enkoder bezpośrednio do wejść procesora. Nie jest to również zbyt dużym problemem, gdyż kilka takich wejść zostało wyprowadzonych na "Expansion Port 14 pin IDC". Wejścia te zostały podłączone zgodnie z poniższym schematem:
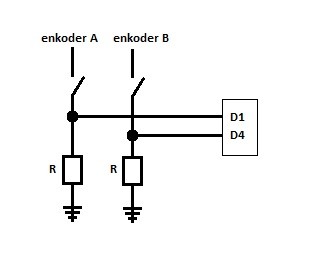
Na podanym porcie wyprowadzone zostały wejścia numer: D0, D1, D2, D3, D4, D5, D6, D7, D10. Jednak większość z tych wejść pełni też inne role w sterowniku Industruino i tylko niektóre z nich można sterować prądowo. W związku z tym do projektu można wykorzystać wejścia: D1, D4, D5, D6, D7, D10. Aby odpowiednio obsłużyć sygnały A i B enkodera potrzeba jeszcze dołączyć do jednego z tych wejść przerwanie. Wybrany procesor może obsłużyć do 5 przerwań znajdujących się na wejściach: D0, D1, D2, D3, D7. Na podstawie powyższych ustaleń możemy stwierdzić, że do testowanego modelu Industruino możemy podpiąć maksymalnie 2 enkodery, których jeden z sygnałów musi być podpięty do wejścia D1 lub D7.
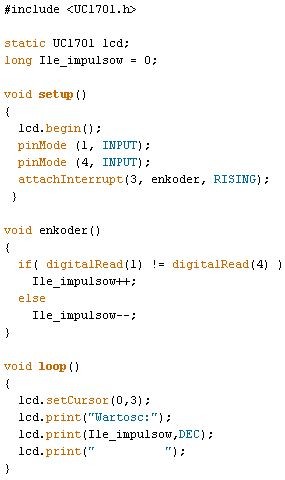
Aby odczytywać i rejestrować pozycję enkodera wykorzystaliśmy najprostszą metodę polegającą na wykryciu zbocza narastającego jednego z sygnałów (A) oraz porównaniu do aktualnej wartości drugiego sygnału (B). Zgodnie z tą metodą jeżeli enkoder kręci się w kierunku zgodnym do wskazówek zegara to wartość sygnału B jest podczas każdego przerwania różna od wartości sygnału A. Jeżeli natomiast sygnały A i B są sobie równe to enkoder porusza się w kierunku przeciwnym do ruchu wskazówek zegara. Wadą tej metody jest utrata połowy precyzji enkodera. Poniżej znajduję się kod napisany w programie Arduino IDE, który wykorzystuje bibliotekę : "UC1701.h" służącą do obsługi wyświetlacza znajdującego się na sterowniku Industruino.
Po stworzeniu projektu można stwierdzić, że podłączenie do sterownika Industruino enkodera nie jest zbyt skomplikowane, natomiast rozwiązanie to ma niestety pewne ograniczenia. Podczas testów korzystaliśmy z enkodera inkrementalnego o rozdzielczości 1024 imp/obr. W naszym projekcie sterownik odczytywał dokładnie pozycję przy wolnych obrotach. Przy większych niestety zaczynał "gubić" impulsy (częstotliwość zmiany sygnału A była większa od częstotliwości wykonywania przerwań). Dlatego do zastosowań przemysłowych proponowalibyśmy zastosowanie enkoderów o małej rozdzielczości dla szybszych procesów lub ewentualnie enkoderów o nieco większej rozdzielczości, w sytuacji gdy wiemy, że wał enkodera będzie poruszał sie powoli.
Menu
-
Sterowniki PLC
-
Zasilacze
-
LED - prądowe
- LPC obudowa IP67
- PLD obudowa IP30
- APC budżetowe
- PCD opcja regulacji
- PLM plastikowe
- HLG-C metalowe
- PLM-E plastikowe
- GSC wtyczkowe
- LCM regulacja/DALI
- ELG-C metalowe IP67
- HVG-C metalowe IP67
- HVG wysokie Uwe
- LDH sterownik LED
- XLG - wodoszczelne
- LDC - stałomocowe
- IDLC prądowe
- ODLC prądowe/ DALI
- IDPC prądowe
-
LED - napięciowe
- LPV obudowa IP67
- PLC obudowa IP30
- APV budżetowe
- NPF 3 funkcje ściemniania
- ELN ze ściemnianiem
- PWM ściemnianie/DALI
- LPF 3 ściemniania
- PLN aktywne PFC
- HLN 3 ściemniania
- HSG regulacja prądu
- CEN metalowe IP66
- CLG metalowe IP67
- HLG metalowe IP67
- HEP bezwentylatorowe
- HLP bez obudowy
- HBG okrągłe
- PLP do wbudowania
- ELG metalowe IP67
- IDLV z wyjściem PWM
- ODLV z wyjściem PWM
- IDPV z wyjściem PWM
- SLD LED - SLIM
- Szyna DIN
-
Modułowe
- SP 1-wyjściowe
- TP 3-wyjściowe
- QP 4-wyjściowe
- D 2-wyjściowe
- T 3-wyjściowe
- Q 4-wyjściowe
- RS 1-wyjściowe
- RD 2-wyjściowe
- RT 3-wyjściowe
- RQ 4-wyjściowe
- HSP profil 1U 1-wyj
- HDP profil 1U 2-wyj
- SPV programowalne
- HRP profil 1U 1-wyj
- RSP 1f równoległy
- RST 3f równoległy
- LRS 1-wyjściowe
- SCP buforowe
- AD buforowe
- S 1-wyjściowe
- UHP - do zabudowy
- ERDN - redundantne
- PSPA równoległe
- ENP 1-wyjściowy
- ERPF 1-wyjściowy
- PHP - do zabudowy
- CSP-wysokie napięcie
- LAD - buforowe
- NSP - duża moc
- BIC - dwukierunkowy
- Medyczne
- Bez obudowy
- Wtyczkowe
- Interfejs DALI
- Ładowarki
- Przetwornice DC/AC
- DC/DC: do wlutowania
- DC/DC: do zabudowy
- Szafy Rack 19"
- Przemysłowe ATX
- Akcesoria
- Wycofane
-
LED - prądowe
- Sieci przemysłowe
- Napędy
- Komponenty
- Wyszukiwarka Zasilaczy
Witaj w sklepie, zapraszamy do kontaktu i wsparcia przed zakupem













